Jednym z projektów rozwijanych w ramach NKR jest głosowy włącznik światła.
Projekt składa się z dwóch głównych części:
Pierwsza część odpowiada za translację anologowego sygnału mowy. Poprzez skrypt napisany w językach PHP i javascript łączymy się z Web Speech API Google (demo API można przetestować tutaj: https://www.google.com/intl/en/chrome/demos/speech.html). API zwraca przesłany sygnał dźwiękowy w postaci tekstu, który jest z kolei przesyłany do kontrolera serw.
Poprzednie wersje projeku włącznika światła wykorzystywały drugi system rozpoznawania mowy, Sphinx (http://cmusphinx.sourceforge.net/), jednak ze względu na lepszą obsługę języka polskiego oraz zdecydowanie lepsze radzenie sobie z rozpoznawaniem całych zdań, przełączyliśmy się na API Google.
Sprzętem używanym w pracowni do odbioru sygnału jest Creative Sound Blaster.

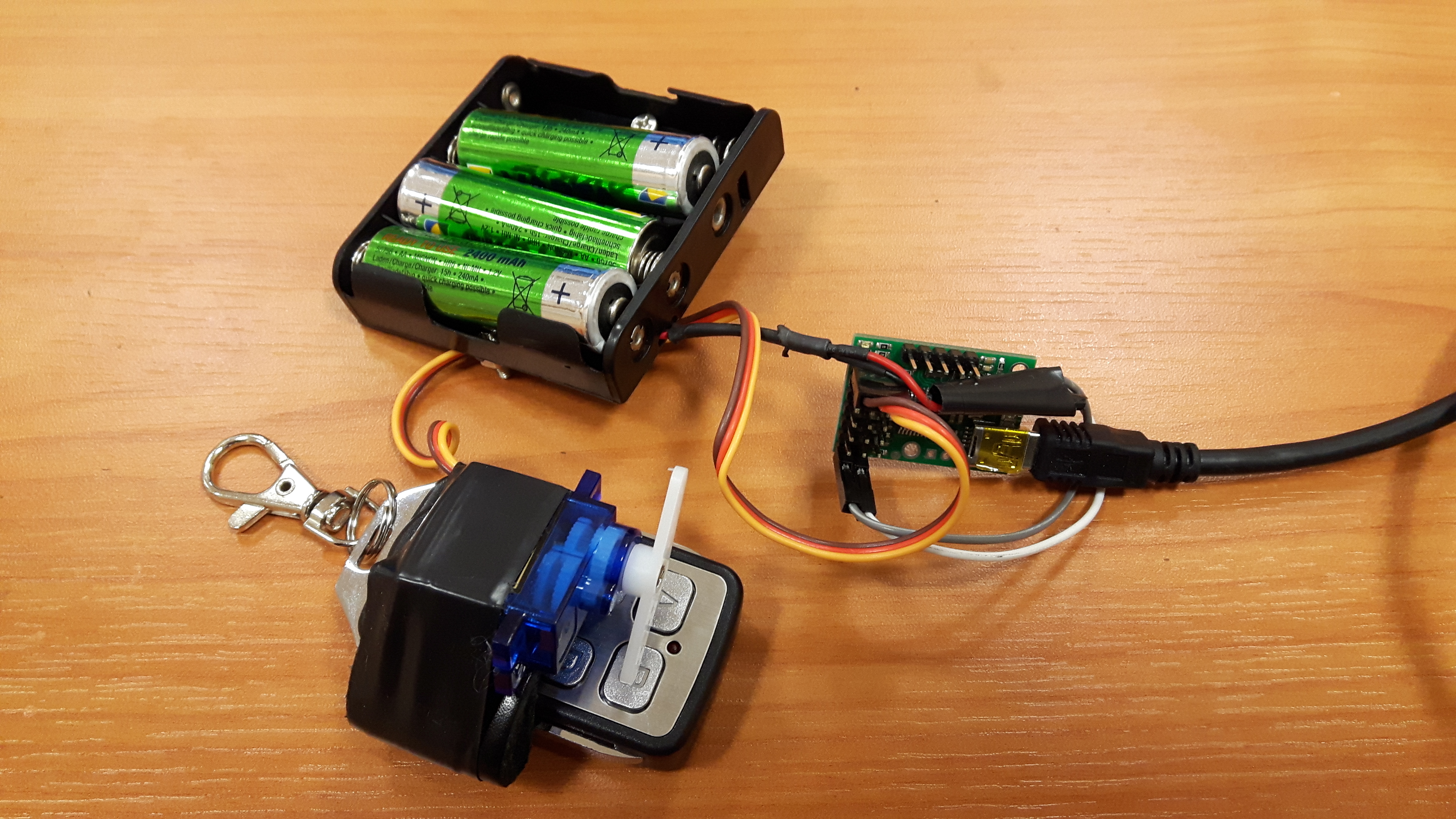
Druga część projektu odpowiada za fizyczne przełączenie włącznika światła na podstawie otrzymanej komendy. Wspomniany wcześniej skrypt PHP odbiera przetłumaczoną na tekst komendę głosową i na jej podstawia uruchamia odpowiedni plik exe. Plik exe jest odpowiedzialny za przełączenie danego kontrolera serw, który z kolei przełącza przycisk na pilocie i powoduje włączenie/wyłączenie światła.
Na chwilę obecną w pracowni zamontowany jest jeden przełącznik, projekt będzie poszerzany w przyszłości o kolejne przełączniki.
Powyższa część projektu była rozwijana przez Justynę Zelman,
Kontynuacją projektu, było stworzenia bezpośredniego połączenia z radiowym włącznikiem światła bez użycia pilota. Opis prac jest poniżej.
Livolo VL-RMT02
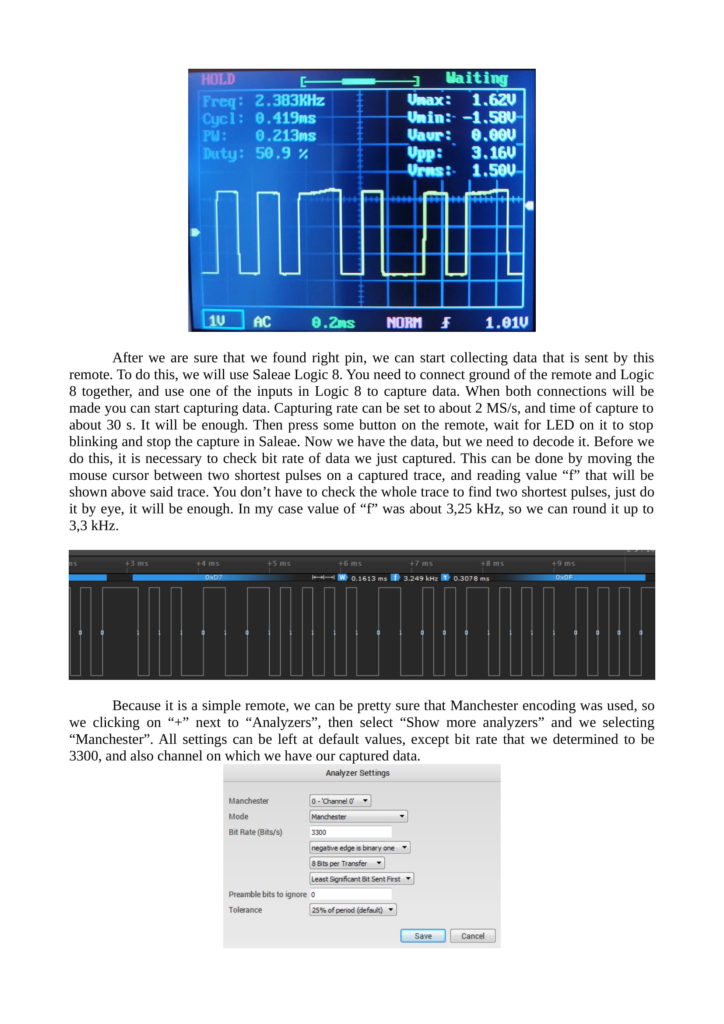
Reverse engineering of Livolo VL-RMT02, a RF remote used for controlling light switch. In the „Description” folder, you can find a „How to” tutorial that shows how one can easily reverse engineer such RF remotes.
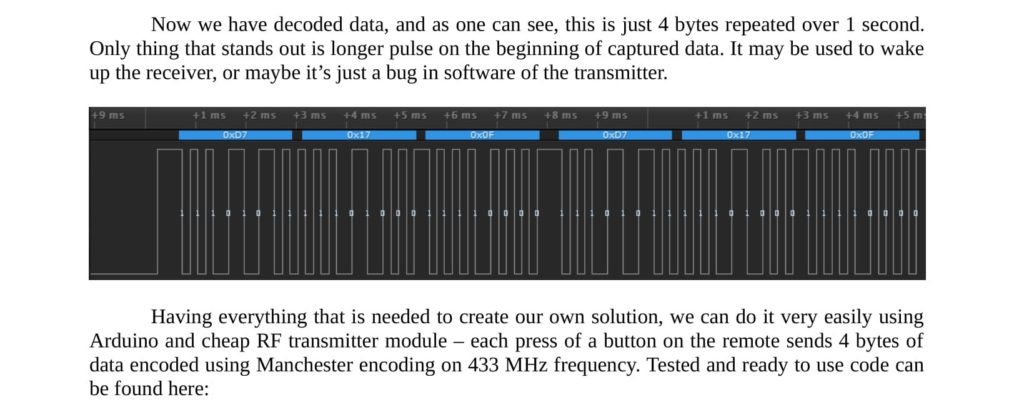
The „livolo_vl-rmt02” folder contains source code for Arduino that can be used to control light switch without using mentioned remote. You only need to have the cheapest RF module that you can get from AliExpress, that will be transmitting data on 433 MHz frequency.

https://github.com/wcyb/livolo_vl-rmt02
/*
* (c) 2019 Wojciech Cybowski
* https://github.com/wcyb/livolo_vl-rmt02
*/
#define TXPIN 52//you change this pin to suit your needs
#define LED 13
const uint8_t btnA[3] = {0xD7, 0x17, 0x0F};//data to send for each of the buttons
const uint8_t btnB[3] = {0xD7, 0x17, 0x07};
const uint8_t btnC[3] = {0xD7, 0x17, 0x0B};
const uint8_t btnD[3] = {0xD7, 0x17, 0x33};
void sendByte(const uint8_t& byteToSend, const bool& start = false, const bool& repStart = false);
void sendCommand(const uint8_t dataArray[]);
void setup() {
pinMode(TXPIN, OUTPUT);
pinMode(LED, OUTPUT);
digitalWrite(TXPIN, LOW);
digitalWrite(LED, LOW);
Serial.begin(115200);
Serial.println(F("READY"));
}
void loop() {
if (Serial.available())
{
switch (Serial.read())
{
case 'A':
digitalWrite(LED, HIGH);
sendCommand(btnA);
Serial.println(F("A sent"));
break;
case 'B':
digitalWrite(LED, HIGH);
sendCommand(btnB);
Serial.println(F("B sent"));
break;
case 'C':
digitalWrite(LED, HIGH);
sendCommand(btnC);
Serial.println(F("C sent"));
break;
case 'D':
digitalWrite(LED, HIGH);
sendCommand(btnD);
Serial.println(F("D sent"));
break;
}
digitalWrite(LED, LOW);
}
}
void sendByte(const uint8_t& byteToSend, const bool& start = false, const bool& repStart = false)
{
bool clk = false;//clock
if (repStart)//adjust rep start time to get 0,5ms pulse length
{
digitalWrite(TXPIN, HIGH);
delayMicroseconds(190);
}
else if (start)//first bit in the first byte of command is longer than normal - it is about 0,5ms pulse
{
digitalWrite(TXPIN, HIGH);
delayMicroseconds(350);
}
for (int16_t i = 1; i <= 128; i <<= 1)//apply Manchester encoding to data
{
for (uint8_t j = 0; j < 2; j++)
{
clk = !clk;
if (static_cast<bool>(i & byteToSend) ^ clk) digitalWrite(TXPIN, LOW);
else digitalWrite(TXPIN, HIGH);
delayMicroseconds(150);//wait to get correct bit rate - about 3300
}
}
}
void sendCommand(const uint8_t dataArray[])
{
for (uint8_t rep = 0; rep < 128; rep++)//repeat data 128 times
{
for (uint8_t i = 0; i < 3; i++)
{
sendByte(dataArray[i], (i == 0) ? true : false, (i == 0 && rep > 0) ? true : false);//set start to true if the first byte of packet is sent and set repStart to true if it is any next packet
}
}
digitalWrite(TXPIN, LOW);//make sure than TX pin will be LOW after transmitting
}