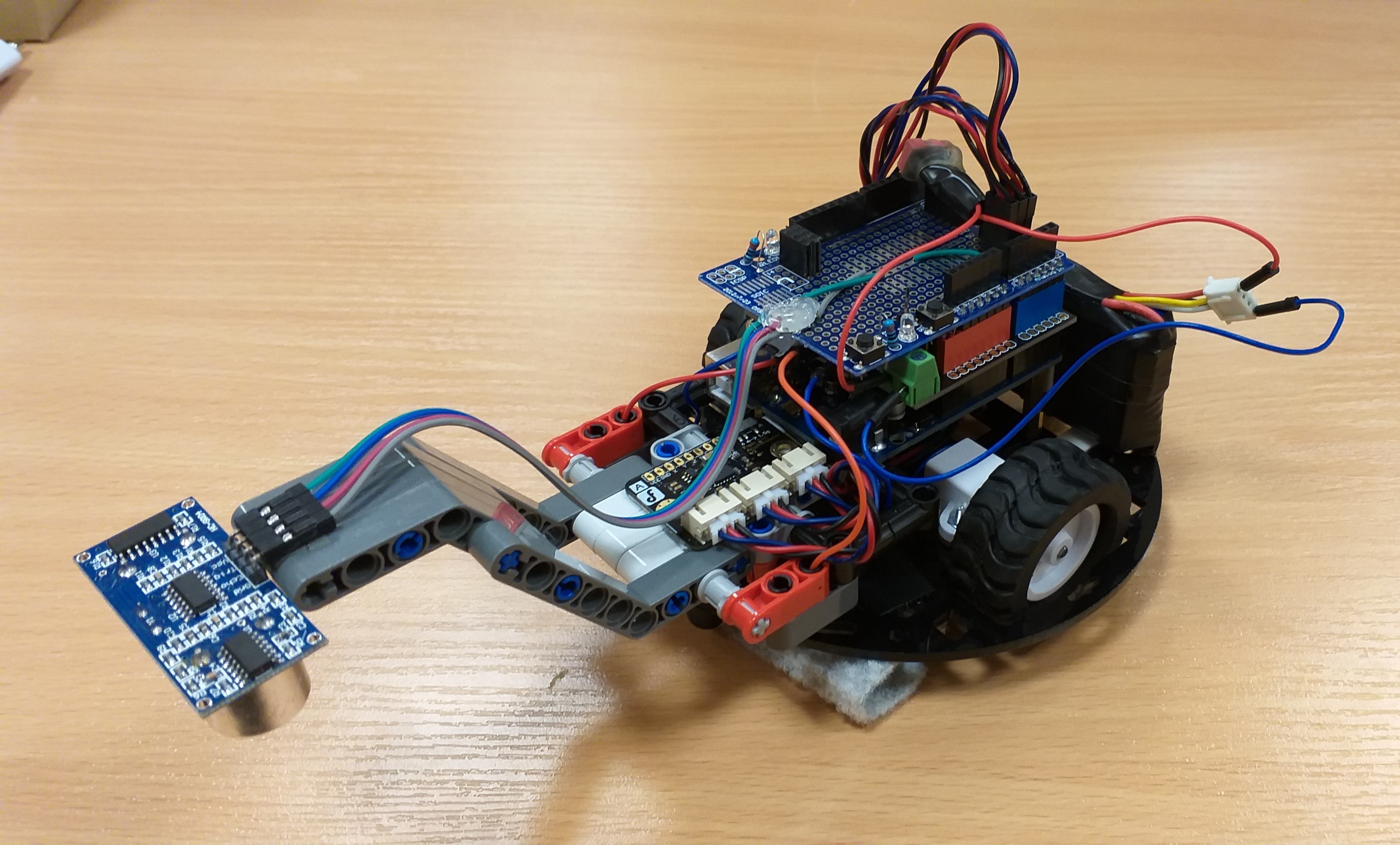
Potrafi sprawnie poruszać się po tablicy dzięki silnikom o momencie obrotowym 0.882Nm. Na tablicy utrzymują go magnesy neodymowe, a przed wyjechaniem z niej zapobiegają informacje
otrzymywane z sensora odległości. W danych informacjach zawarta jest odległość sensora od powierzchni pod nim. Zwiększa się ona, gdy znajdzie się on nad ścianą, co daje robotowi znak do wykonania skrętu. Do rozpoznawania w jakim kierunku pojazd się porusza służy akcelerometr.
Twórcy projektu: Michał Skłodowski i Patryk Kapusto