")



Moduły ultra-szybkiego pozycjonowania POZGEO 2 i NAWGEO P
Ultraszybkie pozycjonowanie statyczne, ze względu na krótką sesję pomiarową, wymaga zastosowania zaawansowanych metod umożliwiających szybkie i efektywne wyznaczenie nieoznaczoności. Czas wymagany do wyznaczenia i weryfikacji nieoznaczoności (time-to-fix) jest funkcją długości sesji obserwacyjnej, odległości odbiornika użytkownika od stacji referencyjnych, liczby śledzonych satelitów, ich geometrii oraz geometrii samego rozwiązania (np. jedno- lub wielostacyjne). Wykorzystując najnowsze osiągnięcia naukowe w zakresie algorytmów do precyzyjnego opracowania obserwacji, zastosowaniu nowych sygnałów z powstających systemów GNSS, takich jak Galileo, a przede wszystkim w dokładnym modelowaniu błędów występujących w pomiarach satelitarnych można sądzić, że możliwe jest znaczne skrócenie wymaganej sesji obserwacyjnej przy podniesieniu dokładności i wiarygodności wyników.
Cechy charakterystyczne modułu POZGEO 2:
⇒ obserwacje L1&L2 (&L5/E5a),
⇒ obserwacje GPS i Galileo,
⇒ dokładne poprawki troposferyczne i jonosferyczne,
⇒ rozwiązanie sieciowe (do 3 najbliższych stacji referencyjnych),
⇒ opracowanie wektorów o długości ~ 100 km,
⇒ wymagana minimalna długość sesji obserwacyjnej: 5 minut,
⇒ zalecany interwał zapisu obserwacji 10 sekund,
⇒ dokładność pozycji horyzontalnej ~ 2 cm.
Cechy charakterystyczne modułu NAWGEO P:
⇒ opracowanie danych kinematycznych w trybie postprocessingu,
⇒ obserwacje L1&L2 (&L5/E5a),
⇒ obserwacje GPS i Galileo ,
⇒ dokładne poprawki troposferyczne i jonosferyczne,
⇒ rozwiązanie sieciowe (do 3 najbliższych stacji referencyjnych),
⇒ opracowanie wektorów o długości ~ 100 km,
⇒ wymagana minimalna długość sesji obserwacyjnej: 5-10 minut,
⇒ dokładność pozycji horyzontalnej ~ 3 cm.
Moduły zapewniają uzyskanie pozycji na poziomie centymetrowym już na podstawie opracowania sesji o długości min. 5 minut z interwałem min. 10 sekund. Rozwiązanie przebiega w trybie sieciowym w nawiązaniu do trzech najbliższych stacji istniejącego systemu ASG-EUPOS. W tym rozwiązaniu długości wektorów wyznaczających dochodzą do kilkudziesięciu kilometrów. Rysunek 1 przedstawia ogólny schemat opracowania obserwacji GNSS w projekcie ASG+. Dostęp użytkownika do modułu odbywa się przez stronę www, na której to użytkownik po zalogowaniu przesyła obserwacjie satelitarne w formacie RINEX. Na tym kończy się udział użytkownika, a uruchamiane są kolejne moduły obliczeniowe systemu. W pierwszej kolejności importowane są obserwacje z przesłanego pliku. Na tym etapie pobierane są również orbity z zewnętrznych serwerów. Następnie przeprowadzane jest rozwiązanie w trybie autonomiczym-przybliżonym. Na podstawie pozycji przybliżonej wybierane są 3 najbliższe stacje nawiązania tworzące korzystny układ geometryczny oraz pobierane są obserwacje z tych stacji na czas sesji obserwacyjnej. Do precyzyjnego pozycjonowanie na średniej długości wektorach jak ma to miejsce w sieci ASG-EUPOS niezbędne jest wykorzystanie dokladnych poprawek troposferycznych oraz jonosferycznych. Poprawki te mogą być pozyskane z pozostałych modułów budowanych w ramach projektu ASG+. Istnieje również możliwość generowania poprawek sieciowych w ramach opracowywanego modułu pozycjonowania. Kolejnym etapem obliczeń jest preprocessing obserwacji GNSS, który ma za zadanie min. wykrywanie i naprawę utraconych cykli obserwacji fazowych. W kolejnym etapie, w zależności od trybu (statyczny lub kinematyczny) przeprowadzana jest estymacja parametrów modelu matematycznego precyzyjnego pozycjonowania względnego. Otrzymane wspołrzędne w układzie geocentrycznym przeliczane są do państwowych płaskich i wysokościowych układów współrzędnych.
Po obliczeniach użytkownik otrzymuje raport z obliczeń zawierający opcje (użyte parametry obliczeń, modele opisu zjawisk fizycznych), oznaczenie stacji referencyjnych stanowiących nawiązanie oraz co najważniejsze wspólrzędne wyznaczanego punktu w trybie statycznym bądź też kinematycznych na każdą epokę pomiarową wraz z pełną oceną dokładności oraz oceną wiarygodności rozwiązania nieoznaczoności.
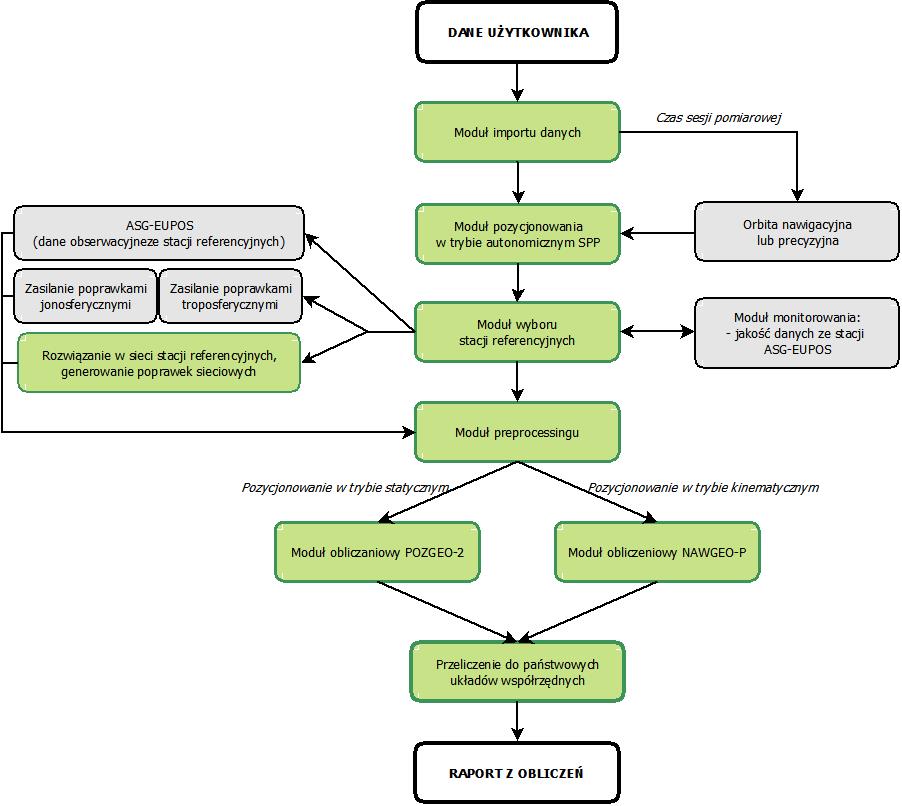
Rys. 1 Ogólny schemat automatycznego systemu opracowania obserwacji GNSS.
W opracowanych algorytmach wykorzystywany jest model matematyczny pozycjonowania względnego z wykorzystaniem podwójnych różnic obserwacji fazowych i kodowych na dwóch częstotliwościach L1&L2 obecnie w przypadku systemu GPS. Algorytmy przygotowane są również na wykorzystywanie i łączne opracowania obserwacji w zmodernizowanym systemie GPS oraz powstającym Galileo na częstotliwościach L1&L5 (GPS) oraz odpowiednio E1&E5a (Galileo). Do rozwiązania nieoznaczoności pomiarów fazowych wykorzystywana jest uznana metoda LAMBDA, która charakteryzuje się bardzo dobrymi rezultatami w sytuacji opracowywania niewielkiej ilości danych obserwacyjnych – krótkich sesji. Jednym z istotniejszych etapów obliczeń jest walidacja rozwiązania nieoznaczoności. Walidacja ma za zadanie sprawdzenie czy wybrany zestaw nieoznaczoności jest prawidłowy i najbardziej prawdopodobny. W prezentowanych modułach do sprawdzenia prawidłowości rozwiązania nieoznaczoności wykorzystano testy W-ratio oraz F-ratio.
