|
Informacje na temat koła naukowego Pojazdów i robotów mobilnych |
 |
 |
|
poniedziałek, 03 grudnia 2012 15:34 |
|
Studenckie Koło Robotów Mobilnych powstało w 2015 roku z inicjatywy studentów. Działa na Wydziale Nauk Technicznych pod opieką mgr inż. Michała Kozłowskiego. Dzięki współpracy z katedrą Mechatroniki i Edukacji Techniczno-Informatycznej ma możliwość korzystania z nowoczesnego laboratorium “Układów Sterowania”, znajdującego się w sali A109. Celem działania koła jest popularyzowanie kierunku Mechatronika poprzez konstruowanie robotów, konstrukcji mechatronicznych oraz prezentacji przygotowanych modeli w czasie imprez naukowych i promocyjnych.
Początkowo studenci skupiali się na budowaniu konstrukcji w oparciu o LEGO Mindstorms EV3 na potrzeby startu w zawodach robotów. Aktualnie nie ograniczają się tylko do technologi LEGO. Ciągły rozwój gwarantuje wykorzystanie coraz to ciekawszych rozwiązań technologicznych tj. Arduino, Raspberry Pi, FPGA MAX10 czy druk 3D.
Jeżeli interesujesz się elektroniką, mechaniką, programowaniem, drukiem 3D lub czymkolwiek co może mieć z tym związek - czekamy na Ciebie. Koniecznie odwiedź naszą grupę na Facebooku tam dowiesz się wszystkiego. Miejsce to wykorzystujemy by umawiać się na spotkania i omawiać wspólnie projekty i problemy.
https://www.facebook.com/groups/800735663274481
Nasze twórcze działanie zawsze przebiega w luźnej i przyjemnej atmosferze. Przyjdź i przekonaj się sam/a.

|
|
|
Seminarium Kół Naukowych |
|
|
|
piątek, 20 maja 2011 10:48 |
|
Z radością i niekrytą satysfakcją informujemy, że Studenci Kołą Naukowego Mechatroniki zajęli II miejsce na XL Międzynarodowym Seminarium Kół Naukowych "KOŁA NAUKOWE SZKOŁĄ TWÓRCZEGO DZIAŁANIA". Podczas panelu "Nauk technicznych" uznanie w oczach komisji oceniającej zdobył referat pt.: "System regulacji kąta natarci płata żaglowego" wygłoszony przez Marcina Jodkowskiego i Wojciecha Wiśniewskiego - członków koła.
|
|
20-23.05.2010 - Wyjazd badawczo-integracyjny |
|
|
|
czwartek, 16 grudnia 2010 21:33 |
|
Pomysł wyjazdu badawczo-integracyjnego zrodził się już w grudniu 2009 roku. Opiekun Koła Naukowego, zaprawiony żeglarz i podróżnik, mgr Maciej Mikuslki, zaproponował krótki, kilkudniowy rejs po naszych pięknych jeziorach mazurskich.
Rejs został zaplanowany na 20 - 23 maja 2010 roku. Wyczarterowaliśmy jacht klasy Phobos 29 o długości całkowitaj 10 metrów, powierzchni grota 32m2 oraz foka 18m2, zgromadziliśmy zapasy żywnościowe i niecierpliwie czekaliśmy na początek przygody.
W końcu nadszedł długo oczekiwany przez nas dzień. |
|
[Aktywny] ROB-MOB |
|
|
|
poniedziałek, 17 maja 2010 18:54 |
|
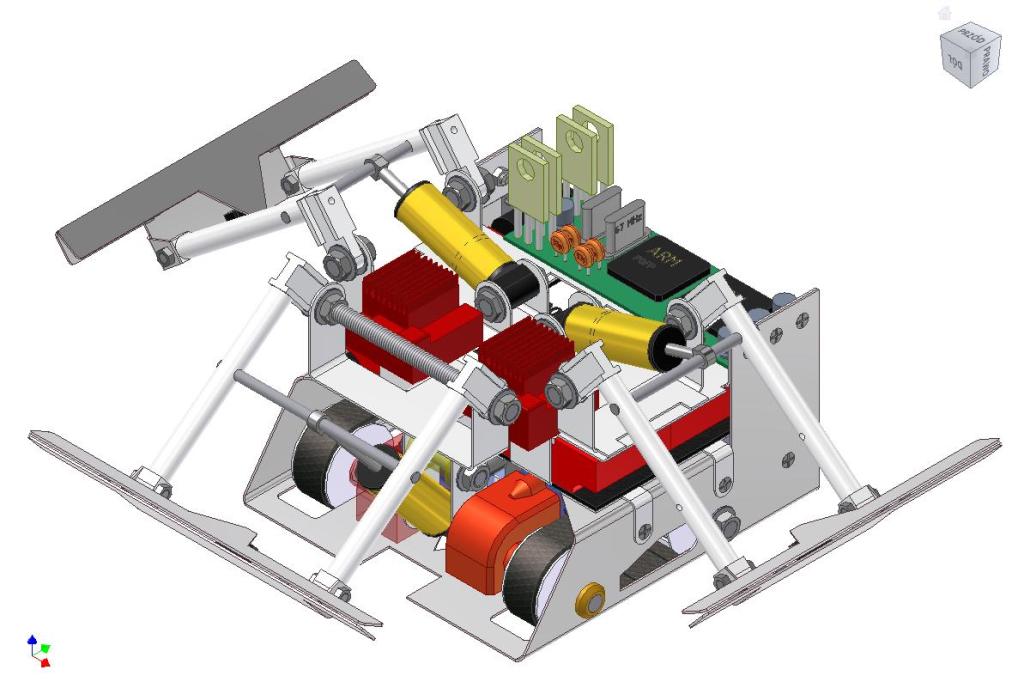
Celem tworzenia robota sumo ROB-MOB jest walka na okrągłej arenie zwanej Dohyo ograniczonej z zewnątrz białym paskiem. Dwa roboty umieszczone na arenie naprzeciw siebie mają za zadanie wypchać przeciwnika poza ograniczającą białą linię. Robot przed walką musi mieścić się w pudełku o długości i szerokości 20 cm. Całkowita waga nie może przekraczać 3 kg. Autonomiczny robot musi być zaprojektowany, tak aby rozpocząć swoje działanie po 5 sekundach od wciśnięcia przycisku przez operatora. Nie ma ograniczeń co do typu ani ilości pamięci zawartej w procesorze używanym przy konstrukcji robota.
ROB-MOB składa się z dwóch niezależnie sterowanych silników prądu stałego przenoszących napęd na gąsienice, jednostki sterującej opartej na dwóch układach scalonych ARM oraz elementów wspomagających. Całość zasilana akumulatorem litowo-polimerowym umieszczona jest w obudowie ze stali stopowej. Robot wyposażony jest w kilka czujników. Część z nich odpowiedzialna jest za pomiar odległości od przeciwnika, natomiast zadaniem kolejnych umieszczonych w podwoziu jest wyłapanie białej linii. Wszystkie sygnały trafiają do głównego mikrokontrolera, do którego został wgrany program sterujący. Program ten analizuje otrzymywane z czujników informacje a następnie generuje odpowiednie sygnały sterujące zgodne z zaprogramowanym algorytmem.
Wykonawcy projektu:
Arkadiusz Olejnik
Kamil Kozłowski
Marcin Minga
Paweł Macełko
|
|
Wyjazd badawczo-integracyjny, przygotowania |
|
|
|
czwartek, 06 maja 2010 00:00 |
|
Już za dwa tygodnie wyjeżdżamy na rejs badawczo-integracyjny.
Startujemy z Pięknej Góry koło Giżycka, zawitamy do Węgorzewa i Sztutowa.
Postaramy się jak najdokładniej przetestować nasz projekt Żagiel - System regulacji kąta natarcia płata żaglowego. |
|
17.03.2010 - Spotkanie |
|
|
|
środa, 17 marca 2010 00:00 |
|
Dziś o godzinie 17 odbyło się czwarte w tym semestrze spotkanie.
W spotkaniu uczestniczyli:
- mgr Maciej Mikulski
- Marcin Jodkowski
- Łukasz Grunwald
- Kamil Fadrowski
- Krzysztof Szulc
- Wojciech Wiśniewski
- Jarosław Rychlica
- Jan Gorczyca
- Dariusz Brzostowski
Co się działo:
- Zaprezentowanie projektu "Robot Alpinista",
- Nowości w sprawie sali dla Koła Naukowego,
- Przyjęcie nowego członka - Dariusza Brzostowskiego
|
|
Publikacje |
|
|
- Polish Maritimie Research, No 4(62) 2009 Vol 16;
- On the adaptation of CAN BUS network for use in the ship electronic systems, Andrzej Piętak, Maciej Mikulski - LINK [.pdf]
- PAR, 7-8/2010;
- System regulacji kąta natarcia płata żaglowego, Marcin Jodkowski, Wojciech Wiśniewski, Maciej Mikulski - LINK
|
|
10.03.2010 - Spotkanie |
|
|
|
środa, 10 marca 2010 00:00 |
|
Dziś o godzinie 17 odbyło się trzecie w tym semestrze spotkanie.
W spotkaniu uczestniczyli:
- mgr Maciej Mikulski
- Marcin Jodkowski
- Łukasz Grunwald
- Kamil Fadrowski
- Krzysztof Szulc
- Wojciech Wiśniewski
- Jarosław Rychlica
- Łukasz Zieleniewicz
- Jan Gorczyca
- Łukasz Chrobot
- Paweł Wieczorek
Co się działo:
- prezentacja dla osób zainteresowanych wstąpieniem do Koła Naukowego,
- przybliżenie nowych przemyśleń na temat projektu "Żagiel",
- omówienie wyjazdu do Warszawy na Automaticon.
|
|
Nabór do Koła Naukowego Mechatroniki |
|
|
|
sobota, 06 marca 2010 16:49 |
|
Serdecznie zapraszamy osoby chcące wstąpić do Koła Naukowego Mechatroniki na spotkanie dnia 10 marca 2010 roku o godzinie 17. Spotkanie odbbędzie się w Katedrze Mechatroniki.
Na spotkaniu zostanie przedstawione to czym i w jaki sposób się zajmujemy. Zostaną również omówione korzyści płynące z bycia członkiem Koła Naukowego oraz obowiązujące zasady.
---
Członkowie Koła Naukowego Mechatroniki |
|
03.03.2010 - Spotkanie |
|
|
|
środa, 03 marca 2010 00:00 |
|
Dziś o godzinie 17 odbyło się drugie w tym semestrze spotkanie.
W spotkaniu uczestniczyli:
- mgr Maciej Mikulski
- Marcin Jodkowski
- Łukasz Grunwald
- Kamil Fadrowski
- Krzysztof Szulc
- Wojciech Wiśniewski
- Jarosław Rychlica
- Łukasz Zieleniewicz
- Jan Gorczyca
- Łukasz Chrobot
- Paweł Wieczorek
- Piotr Pawłowski
- Kuba Cygan
Co się działo:
- ustaliliśmy, że na każdym spotkaniu będzie wygłaszany referat w formie prezentacji o nowinkach technicznych dotyczących mechatroniki,
- ustaliliśmy dokładny termin i plan rejsu integracyjnego, który będzie połączony z testowaniem projektu "Inteligentny Żagiel",
- zostały wyznaczone dwie osoby odpowiedzialne za załatwienie lokum dla Koła Naukowego,
- przedyskutowaliśmy referaty dotyczące projektów "Inteligentny Żagiel" i "Robot Alpinista",
- została wyznaczona delegacja, która pojedzie na Międzynarodowe Targi Automatyki i Pomiarów - AUTOMATICON
- do Koła dołączył nowy członek - Kuba Cygan.
|
|
|
|
|
|
|
Strona 1 z 2 |




 |
|