Koła naukowe
Statystyki
Użytkowników : 880Artykułów : 134
Zakładki : 6
Odsłon : 368458
Współpraca

| [Aktywny] ROB-MOB |
 |
 |
| poniedziałek, 17 maja 2010 18:54 |
|
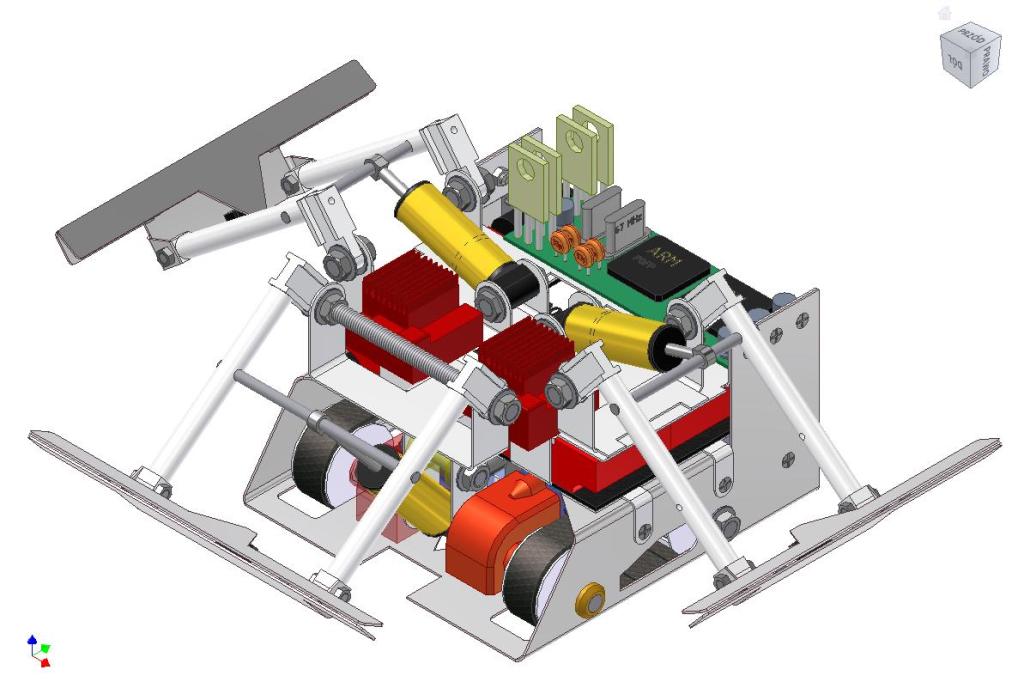
Celem tworzenia robota sumo ROB-MOB jest walka na okrągłej arenie zwanej Dohyo ograniczonej z zewnątrz białym paskiem. Dwa roboty umieszczone na arenie naprzeciw siebie mają za zadanie wypchać przeciwnika poza ograniczającą białą linię. Robot przed walką musi mieścić się w pudełku o długości i szerokości 20 cm. Całkowita waga nie może przekraczać 3 kg. Autonomiczny robot musi być zaprojektowany, tak aby rozpocząć swoje działanie po 5 sekundach od wciśnięcia przycisku przez operatora. Nie ma ograniczeń co do typu ani ilości pamięci zawartej w procesorze używanym przy konstrukcji robota.
ROB-MOB składa się z dwóch niezależnie sterowanych silników prądu stałego przenoszących napęd na gąsienice, jednostki sterującej opartej na dwóch układach scalonych ARM oraz elementów wspomagających. Całość zasilana akumulatorem litowo-polimerowym umieszczona jest w obudowie ze stali stopowej. Robot wyposażony jest w kilka czujników. Część z nich odpowiedzialna jest za pomiar odległości od przeciwnika, natomiast zadaniem kolejnych umieszczonych w podwoziu jest wyłapanie białej linii. Wszystkie sygnały trafiają do głównego mikrokontrolera, do którego został wgrany program sterujący. Program ten analizuje otrzymywane z czujników informacje a następnie generuje odpowiednie sygnały sterujące zgodne z zaprogramowanym algorytmem.
Wykonawcy projektu: Arkadiusz Olejnik Kamil Kozłowski Marcin Minga Paweł Macełko
|