| Naukowe Koło Młodych Konstruktorów |
| Strona Główna |
| O nas... |
| Projekty |
| Wyjazdy |
| Kontakty |
| Linki |
| Aktualnie zajmujemy się... |
| Galerie Foto |
| Forum |
|
|
Prace Naukowego Koła Młodych Konstruktorów rozpoczęły się od „burzy mózgów”, dzięki czemu wyłoniono trzy projekty do dalszych prac. Trzy zespoły pracowały nad opracowaniem problemów, które wystąpią w każdym z projektów oraz nad ciekawymi możliwościami rozwoju naszych zainteresowań jako Koła. Projektami tymi były:
Elektrownia wiatrowa:
Ślizgacz (poduszkowiec):
Batyskaf:
Pierwsze dwa projekty zostały zawieszone i prace skupiły się nad opracowaniem konstrukcji batyskafu jako bezzałogowej jednostki podwodnej.
Batyskaf
Wstępne analizy oraz ocena możliwości realizacji projektu na etapie wyboru
koncepcji i budowy prototypu jednostki doprowadziły do określenia w sposób
przybliżony wymiarów gabarytowych kadłuba:
-
maksymalna średnica korpusu D = 0,3 m
-
długość jednostki L około 0,7 m
Otrzymana wyporność zostanie wykorzystana na umieszczenie wewnątrz kadłuba
wymiennej aparatury badawczej. W pierwszej wersji planuje się wykorzystanie
narzędzi służących do rejestrowania obrazów oraz widm podczerwonych.
Docelowo zakłada się montaż narzędzi umożliwiających pobieranie próbek wody,
roślinności oraz gruntu
z dna badanego zbiornika.
Zadania do realizacji w ramach projektu:
-
projekt i wykonanie stanowiska do pomiaru ciągu śruby napędowej
-
opracowanie i wybór koncepcji rozwiązania regulacji pływalności
-
model interakcji między jednostką i wodą podczas ruchu batyskafu
-
opracowanie i wybór koncepcji wynurzenia awaryjnego
-
dobór mechanizmów sterujących wg. ostatecznie wybranej koncepcji napędu i sterowania jednostką
-
dobór oprzyrządowania dodatkowego, opracowanie sposobu zamocowania elementów zewnętrznych
ZADANIA ZREALIZOWANE
wybór koncepcji napędu i sterowania jednostką
Pierwszym krokiem było wybranie z pośród wielu koncepcji pięciu dobrych, biorąc pod uwagę założone kryteria odnośnie napędu i sterowania jednostką:
-
sterowność,
-
szczelność,
-
technologiczność,
-
niezawodność koszt wytworzenia,
-
energochłonność,
-
funkcjonalność,
-
trwałość,
-
prosta i zwarta budowa
Koncepcja I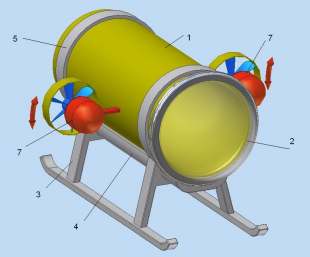 |
Zalety: • istnieje możliwość łatwego uszczelnienia • prostej wymiany podzespołów eksploatacyjnych • sterowanie pionowe za pomocą prostego serwomechanizmu. Wady: • sterowanie na boki tylko za pomocą zmiany parametrów pracy silników. |
|
Koncepcja II 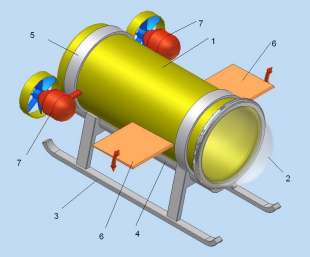 |
Zalety: • istnieje możliwość łatwego uszczelnienia osi utrzymujących płetwy boczne i ramienia wykonawczego płetwy ogonowej • prostej wymiany podzespołów eksploatacyjnych Wady: • sterowanie za pomocą dwóch serwomechanizmów • skręt tylko w ruchu • brak możliwości obrotu w miejscu |
|
Koncepcja III 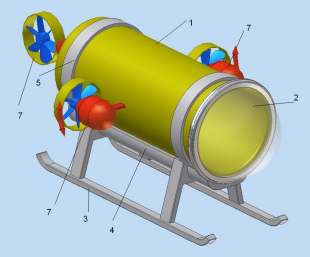 |
Zalety: • zanurzenie i wynurzenie jednostki na krótkim odcinku • mały promień skrętu w płaszczyźnie poziomej • zmiana kierunku płynięcia po zatrzymaniu jednostki Wady: • mieszanie się wody z zanieczyszczeniami przy nawrotach blisko dna |
|
Koncepcja IV 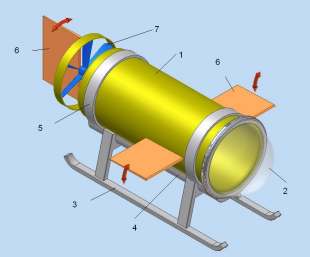 |
Zalety: • doskonała zwrotność bez konieczności nadawania prędkości obiektowi • możliwość zawracania w miejscu dzięki współpracy wszystkich pędników Wady: • skomplikowana budowa układu • trudność w synchronizacji pracy pędników |
|
Koncepcja V  |
Zalety: • istnieje możliwość łatwego uszczelnienia • prostej wymiany podzespołów eksploatacyjnych • sterowanie pionowe za pomocą prostego serwomechanizmu Wady: • wykonanie dysz i stworzenie mechanizmów sterowania nimi • znaczne zmętnienie wody przez podnoszony osad z dna |
Legenda: 1-korpus, 2-przezierna sfera, 3-płozy, 4-balast, 5-mocowanie płóz i balastu do kadłuba, 6-płetfy sterowe, 7-pędniki, 8-dysze
Aktualne prace zespołu skupiają się nad modelowaniem i symulacją poszczególnych rozwiązań w celu wyłonienia polioptymalnego ze względu na przyjęte kryteria. Szczególny nacisk planuje się położyć na wykonanie badań symulacyjnych przy użyciu zawansowanych systemów analizy inżynierskiej.
wstępna analiza wytrzymałościowa korpusu
Kolejny etap prac nad
projektem i wykonaniem bezzałogowej podwodnej jednostki pływającej
(batyskafu).
Obecnie analizy wytrzymałościowe skupiają się na modelowaniu konstrukcji
za pomocą
nowoczesnych systemach inżynierskich. Do obliczeń tego typu najczęściej
wykorzystuje się Metodę Elementów Skończonych.
Dokonane na przełomie października i listopada 2005 roku wstępne obliczenia wytrzymałości korpusu metodą MES zostały poparte obliczeniami analitycznymi, z wykorzystaniem zagadnienia Lame'go.

Niezależne obliczenia dwiema, całkowicie różnymi metodami doprowadziły do spójnych wyników odnośnie odkształceń. W ten sposób nastąpiło sprawdzenie wiarygodności zastosowanego wcześniej modelu obliczeniowego MES. Analiza materiałów i kształtów korpusu pozwoliła uzyskać dobre rozwiązanie względem założonych kryteriów. Materiał grubościennej rury gazowej, która posłuży nam za korpus jednostki wykazał odkształcenia na zadowalającym poziomie dziesiętnych części milimetra.
Poczynione obliczenia są podstawa do prowadzenia dalszych prac Koła Naukowego nad projektem. Aktualnie nasze prace nad korpusem skupiają się na znalezieniu odpowiedniej kopuły dla kamery batyskafu. Obliczenia MES dostępnej kopuły szklanej wykazały ze materiał nie wytrzyma naprężeń na założonej głębokości 50m. Kolejne prace koła skupiać się będą na opracowaniu zagadnień związanych z pływalnością jednostki przy wykorzystaniu nowoczesnych technik symulacji.
dobór przeziernej kopuły obserwacyjnej
Cel badania: Sprawdzenie przydatności
szklanej kopuły do zastosowania w batyskafie.
Narzędzia i materiały użyte w czasie badań:
- zbiornik z wodą,
- latarka z żarówką o mocy 3,5W,
- aparat cyfrowy HP 720,
- tusz (zielony),
- przedmioty obserwowane: klucz warsztatowy, klucze do zamków od drzwi,
zaginiony NEMO, gazeta poranna, termometr.
Przebieg badań:
Badanie przeprowadziliśmy dnia 3.03.06 w Katedrze Mechaniki i Podstaw
Konstrukcji Maszyn. Badanie polegało na uzupełnieniu wodą zbiornika,
częściowym zanurzeniu kopuły i zrobieniu zdjęć aparatem fotograficznym
przedmiotów leżących na dnie zbiornika. Odległość fotografowanych
przedmiotów od szkła wynosiła ok. 15cm. Warunki oświetlenia po
zasłonięciu zbiornika odpowiadały w przybliżeniu warunkom panującym pod
wodą. W celu symulacji warunków panujących pod wodą zabarwiliśmy wodę
tuszem koloru zielonego. Oświetlenie dla porównania stosowaliśmy
zewnętrzne lub wewnętrzne. Ze względu na zakrzywienie kopuły wykonaliśmy
zdjęcia pod różnym kątem w celu zbadania zniekształceń spowodowanych tym
zakrzywieniem.
Wnioski:
Niewątpliwie można stwierdzić, iż położenie źródła światła ma znaczenie
pierwszorzędne obok jego mocy. Mimo wykonania prób bez fleszu uzyskujemy
odblask przy źródle światła umieszczonym wewnątrz kopuły. Nie pozwala
nam to na spostrzeżenie istotnych elementów. Zatem ważne jest aby
oświetlenie znajdowało się na zewnątrz i aby jego moc była odpowiednio
dobrana do stopnia zamulenia wody i prędkości poruszania się naszego
„obiektu”. Powinno ono też być równomierne, gdyż punktowe nie pozwala
wykonać zadowalających zdjęć. Pamiętajmy, że odległość była bardzo mała.
Powrót do góry
projekt i wykonanie stanowiska do pomiaru ciągu śruby napędowej
Po wykonaniu obliczen kadluba nastepnym krokiem w budowie naszego batyskafu było obliczenie sily uciagu pedników. Najwazniejszym pytaniem było jakiej wielkosci pednika mamy uzyc aby spelnial wszystkie wymagania. Jest to bardzo wazne, gdyz wiaza sie z tym kolejne etapy budowy naszej jednostki plywajacej. Na podstawie tego doswiadczenia mozemy okreslic m.in. rzad sily potrzebnej do napedu jednostki, opory ruchu, predkosc poruszania sie i wiele innych posrednich zagadnien. Do badan uzylismy pednik o srednicy….mm. Z załozenia nasz batyskaf ma miec swoje wewnetrzne zrodlo zasilania, a wiec to z kolei dyktuje nam kolejne koncepcje napedu: silniki potrzebne do napedu musza byc zasilane pradem stalym. My wykorzystalismy w tym celu silnik wkretarki akumulatorowej. Kolejnym etapem była budowa stanowiska umozliwiajacego pomiar wielkosci owej sily. Ponizszy schemat przedstawia stanowisko pomiarowe:
gdzie:
1 – badana sruba napedowa
2 – silnik elektryczny pradu stalego
3 – zrodlo zasilania
4 – waga
Podczas przeprowadzonego doswiadczenia notowane byly nastepujace wielkosci:
- Obroty sruby
- Sila nacisku na wage
- Napiecie
- Natezenie pradu
Na podstawie tych wielkosci mozemy obliczyc moc silnika oraz sile ciagu
sruby w funkcji obrotow sruby. Ta ostatnia mozemy wyznaczyc z rownania
momentow:
Mix = Fp * lo - Fw * L = 0
stad:
Fp = Fw * L / lo
nastepnie otrzymany wynik sprowadzamy do jednostek układu SI.
Wyniki pomiarów:
|
L.p. |
n (obr/min) |
Fp(N) |
U(V) |
I(A) |
P(W) |
Fw(g) |
lo(mm) |
L(mm) |
|
1 |
50 |
0,18 |
1,9 |
0,94 |
1,8 |
16,8 |
457 |
505 |
|
2 |
100 |
0,38 |
3,3 |
1,13 |
3,7 |
35,0 |
457 |
505 |
|
3 |
150 |
0,65 |
4,7 |
1,43 |
6,7 |
59,5 |
457 |
505 |
|
4 |
200 |
0,89 |
6,3 |
1,85 |
11,7 |
82,5 |
457 |
505 |
|
5 |
250 |
1,65 |
7,8 |
2,30 |
17,9 |
152,0 |
457 |
505 |
|
6 |
300 |
2,76 |
9,4 |
2,96 |
27,6 |
255,0 |
457 |
505 |
|
7 |
350 |
3,26 |
10,5 |
3,33 |
34,8 |
301,0 |
457 |
505 |
|
8 |
400 |
5,20 |
12,2 |
4,02 |
49,0 |
480,0 |
457 |
505 |
gdzie kolejno :
n – predkosc obrotowa sruby
Fp – sila ciagu sruby
U – napiecie
I – natezenie
P – moc
Fw – wskazania wagi
lo – odleglosc miedzy silami
L - dlugosc belki
Warto zaznaczyc w tym miejscu, ze przeprowadzilismy kilka prob pomiarow a ostateczne wyniki sa srednia arytmetyczna tych prob.
Znajac powyzsze wartosci mozemy sporzadzic nastepujaca charakterystyke:
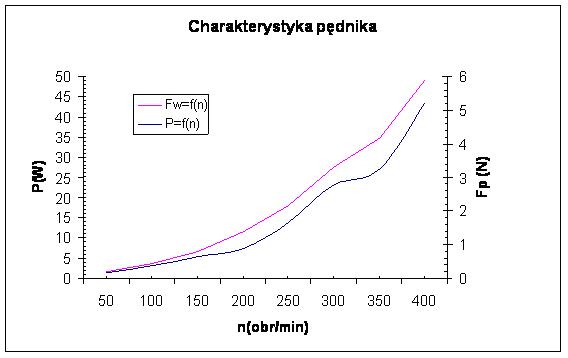
Wnioski:
Przeprowadzone doswiadczenie pozwolilo nam okreslic zarazem potrzebną
wielkość śruby jak i moc silnika do jej napędu. Ponadto max. prędkość
obrotowa śruby w doświadczeniu wynosiła 400 obr/min. zaś obroty
znamionowe silnika elektrycznego wynoszą ok. 550 obr/min. Jest to
optymistyczny fakt gdyz pozostaje jeszcze zapas sily napedowej.
Na podstawie obliczonych wartosci i polaczeniu ich z numerycznym modelem
bedziemy mogli obliczyc m.in. opory ruchu, predkosc jednostki , promien
zawracania itp. Pozwoli nam to na wybor optymalnej koncepcji batyskafu.
Dalsze nasze prace skupimy nad obliczeniami plywalnosci oraz koncepcjami
awaryjnego wynurzania.
opracowanie i wybor koncepcji rozwiazania regulacji plywalnosci batyskafu
Studiując prawo Archimedesa i zależności jakie z niego wynikają doszliśmy do wniosku, że:
1) Ciało PŁYWA gdy
jego gęstość JEST RÓWNA gęstości cieczy w
jakiej pływa
2) Ciało TONIE gdy jego
gęstość jest MNIEJSZA od gęstości cieczy w
jakiej pływa
3) Ciało WYPŁYWA
gdy jego gęstość jest WIĘKSZA od gęstości cieczy
w jakiej pływa
Do obliczeń przyjęliśmy następujące dane: Gęstość wody = 1000kg/m3(wody słonej 1010kg/m3) Gęstość stali = 7800kg/m3
Gęstość szkła = 2457 kg/m3
Gęstość polietylenu = 952 kg/m3
Wymiary korpusu batyskafu to: dł.=700mm Øzew=315 mm Øwew=280mmm
Najistotniejszym elementem potrzebnym do ustalenia poprawnej koncepcji sterowania jest gęstość całego batyskafu.

W skład masy_batyskafu wchodzą: korpus i kopuły.
Objętość batyskafu jest to objętość jaką zajmuje batyskaf.
Tak policzona gęstość wynosi 395 kg/m3 sam batyskaf z kopułą szklana nie jest wstanie swobodnie pływać, a raczej schodzić pod wodę i wynurzać się.
Opracowane zostały 3 koncepcje sterowania pływalnością
Koncepcja I zakłada 2 zbiorniki balastowe umieszczone na zewnątrz, napełniane powietrzem z butli, zamocowanej także na zewnątrz korpusu batyskafu. W celu zanurzenia zbiorniki zostaną napełnione wodą,
Zamocowanie zbiorników i butli na zewnątrz istotnie zwiększa objętość batyskafu. Do początkowej objętości dodaliśmy objętość zbiorników, butli i elementów mocujących. Wzór przyjmuje postać
![]()
Do masy batyskafu dodaliśmy masę zbiorników, masę butli i masę elementów mocujących i masę elementów wyposażenia.
Wzór określający GĘSTOŚĆ przyjmuje dwie postaci, w zależności od tego czy zbiorniki są wypełnione wodą czy powietrzem.
Do obliczeń przyjęliśmy 2 zbiorniki o wymiarach: dł.= 600 mm Ø 160mm i pojemności 8l. każdy. Jako Butlę użyliśmy standardowej butli o pojemności 6l. używanej przez płetwonurków.
Gdy jest wypełniony powietrzem, wtedy wynurza się, a wzór jest następujący:
![]()
Bariera gęstości wody nie zostaje przekroczona z maksymalna masą wyposażenia równą 32 kg
W momencie zapełnienia zbiorników do wzoru należy dodać masę wody w zbiornikach:
Przy zapełnionych zbiornikach minimalna masa wyposażenia, która jest potrzebna do zanurzenia, czyli przekroczenia granicy 1000kg/m3 to 17 kg
Zatem przedział masy wyposażenia w środku w jakim nasz batyskaf zachowuje pływalność to 17-32 kg
Koncepcja II przewiduje przegrodzenie ¼ przestrzeni w srodku korpusu i przeznaczenie jej na zbiornik balastowy, napełniany powietrzem z butli, zamocowanej na zewnątrz korpusu batyskafu. W celu zanurzenia odgrodzona część zostanie wypełniona wodą,
Objętość korpusu została policzona według wzoru:
![]()
Masa batyskafu zostaje zwiększona o: masę przegrody, masę butli, masę elementów mocujących, masę elementów wyposażenia
Wzór na GĘSTOŚĆ ponownie przyjmuje dwie postaci, w zależności od tego czy zbiorniki są wypełnione wodą czy powietrzem.
Do obliczeń przyjęliśmy: Przegrodę o masie 7,60 kg wykonaną ze stali, objętość część przeznaczonej na zbiornik to ok. 10,5l. Butlę stanowi ta sama butla co butla użyta do obliczeń przy koncepcji I
Gdy zbiornik jest wypełniony powietrzem, wynurza się, a wzór jest następujący:
![]()
Bariera gęstości wody nie zostaje przekroczona z maksymalna masą wyposażenia równą 20 kg
W momencie zapełnienia zbiorników do wzoru należy dodać masę wody w zbiornikach:
![]()
Przy zapełnionych zbiornikach minimalna masa wyposażenia, która jest potrzebna do zanurzenia, czyli przekroczenia granicy 1000kg/m3 to 0 kg
Zatem przedział masy wyposażenia w środku w jakim nasz batyskaf zachowuje pływalność to 0-20 kg
Koncepcja III przewiduje umieszczenie butli i zbiorników wewnątrz batyskafu zbiorniki zostałyby wykonane tak jak to pokazuje rysunek niżej,
Objętość batyskafu jest określona wzorem:
![]()
Do masy batyskafu dodajemy: masę zbiorników, masę butli, masę elementów mocujących, masę elementów wyposażenia
Wzór na GĘSTOŚĆ ponownie przyjmuje dwie postaci, w zależności od tego czy zbiorniki są wypełnione wodą czy powietrzem.
Do obliczeń przyjęliśmy: zbiorniki o łącznej masie 13,60 kg wykonane ze stali i objętości całkowitej ok. 12l. Butlę stanowi ta sama butla co butla użyta do obliczeń przy koncepcji I i II
Gdy zbiorniki są wypełnione powietrzem, batyskaf wynurza się, a wzór jest następujący:
![]()
Bariera gęstości wody nie zostaje przekroczona z maksymalna masą wyposażenia równą 17 kg
W momencie zapełnienia zbiorników do wzoru należy dodać masę wody w zbiornikach:
![]()
Przy zapełnionych zbiornikach minimalna masa wyposażenia, która jest potrzebna do zanurzenia, czyli przekroczenia granicy 1000kg/m3 to 8 kg
Zatem przedział masy wyposażenia w środku w jakim nasz batyskaf zachowuje pływalność to 8-17 kg
Kolejnym krokiem dokonania wyboru najlepszej koncepcji jest wybór kryteriów jakie są najistotniejsze w tym zagadnieniu. Dokonaliśmy wyboru następujących kryteriów:
· ZAPAS PŁYWALNOŚCI
· STATECZNOŚĆ
· TECHNOLOGICZNOŚĆ
· OPORY RUCHU
· ZACHOWANE MIEJSCE W ŚRODKU
· MOŻLIWOŚĆ DALSZEGO ROZWOJU
Nasze dalsze rozważania skupią się na ocenie i wyborze najlepszej, pod względem przyjętych kryteriów, koncepcji sterowania pływalnością.
Strona Główna O nas... Projekty Wyjazdy Kontakty Linki Aktualnie zajmujemy się...
